消息称理想汽车成立端到端自动驾驶组织
7月18日消息,据36氪汽车报道,理想汽车近期成立了“端到端自动驾驶”的实体组织,整体 200 人出头,同时公司其他团队一些成员也在灵活支援项目。

报道称,理想智能驾驶团队主要分为算法研发、量产研发两个大组,团队约 800 人。“端到端”的研发主力部署在算法研发组,由理想智能驾驶技术研发负责人贾鹏负责。
算法研发组下设感知算法、行为智能、认知智能等组。“感知算法”由常黎主导;“行为智能”包含端到端架构、端到端模型、控制模型等,由杨毅负责;“认知智能”包含认知模型、云端模型等,实际由詹锟负责。
量产研发组由量产负责人王佳佳负责,包含智能行车、智能泊车、智能安全等。贾鹏与王佳佳均向理想智能驾驶负责人郎咸朋汇报。
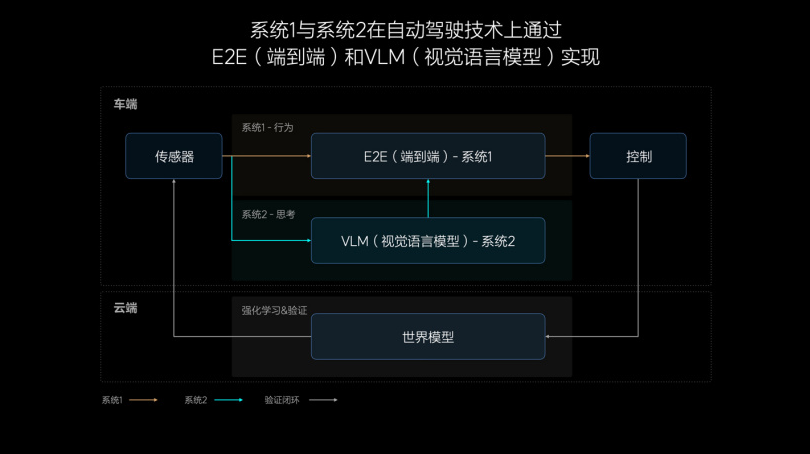
6 月,理想汽车 CEO 李想在 2024 中国汽车重庆论坛上透露,第三季度将向测试用户推出通过 300 万 Clips (预训练模型)训练出来的端到端 + VLM (视觉语言模型)的监督型自动驾驶体系。今年年底到明年年初,将推出超过 1000 万 Clips 训练的监督型自动驾驶体系。

在 7 月 5 日举行的理想智能驾驶夏季发布会期间,理想汽车宣布,端到端 + 视觉语言模型早鸟计划正式启动,号称可让车更智能、更像人。
理想汽车称端到端模型的优势在于“高效传递”和“高效计算”两方面:端到端是一体化的模型,信息都在模型内部传递,具有更高上限,用户所能感受到的整套系统的动作、决策都“更加拟人”;一体化模型可在 GPU 里一次完成推理,且端到端延迟更低,用户可感知到“眼”“手”协调一致,车辆动作响应及时。